




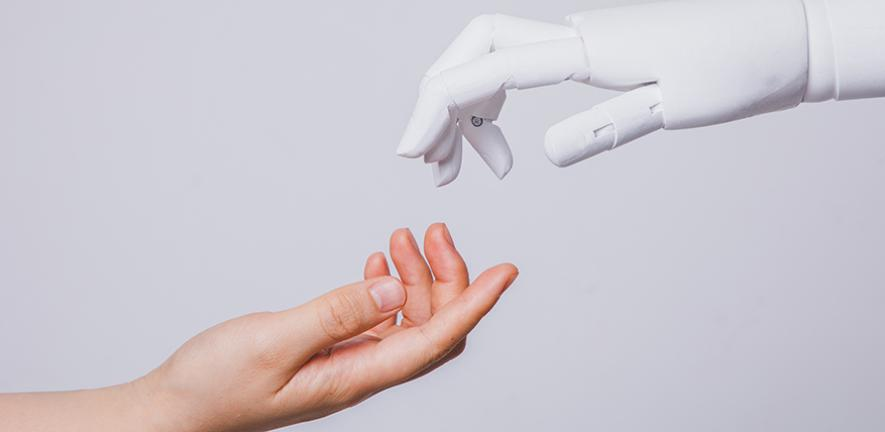
La tecnología, desarrollada por investigadores de la Universidad de Cambridge, se basa en compuestos de metal líquido y grafeno, una forma bidimensional de carbono. Esta “piel” permite a los robots detectar no solo la fuerza con la que presionan un objeto, sino también la dirección de las fuerzas aplicadas, si el objeto se desliza e incluso la rugosidad de la superficie, a una escala lo suficientemente pequeña como para rivalizar con la resolución espacial de las yemas de los dedos humanos. Sus resultados se publican en la revista Nature Materials .
Los dedos humanos dependen de múltiples tipos de mecanorreceptores para percibir simultáneamente la presión, la fuerza, la vibración y la textura. Reproducir este nivel de percepción táctil multidimensional en sistemas artificiales supone un reto importante, especialmente en dispositivos que sean lo suficientemente pequeños y resistentes para su uso práctico.
«La mayoría de los sensores táctiles actuales son demasiado voluminosos, frágiles, complejos de fabricar o incapaces de distinguir con precisión entre fuerzas normales y tangenciales», afirmó el profesor Tawfique Hasan, del Centro de Grafeno de Cambridge, quien dirigió la investigación. «Esto ha supuesto un obstáculo importante para lograr una manipulación robótica verdaderamente diestra».
Para superar este problema, el equipo de investigación desarrolló un material compuesto suave y flexible, que combina láminas de grafeno, microgotas metálicas deformables y partículas de níquel, incrustadas en una matriz de silicona.
Inspirándose en las microestructuras presentes en la piel humana, los investigadores dieron forma al material creando diminutas pirámides, algunas de tan solo 200 micrómetros de diámetro. Estas estructuras piramidales concentran la tensión en sus vértices, lo que permite al sensor detectar fuerzas extremadamente pequeñas manteniendo un amplio rango de medición.
El resultado es un sensor táctil lo suficientemente sensible como para detectar un grano de arena. En comparación con los sensores táctiles flexibles existentes, el nuevo dispositivo mejora el tamaño y los límites de detección en aproximadamente un orden de magnitud.
El sensor también puede distinguir las fuerzas de cizallamiento de la presión normal, una capacidad que le permite detectar cuándo un objeto comienza a deslizarse. Al medir las señales de cuatro electrodos ubicados debajo de cada pirámide, el sensor puede reconstruir matemáticamente el vector de fuerza tridimensional completo en tiempo real.
En las demostraciones, el equipo integró los sensores en pinzas robóticas. Los robots pudieron sujetar objetos frágiles, como tubos de papel delgados, sin aplastarlos. A diferencia de los sensores de fuerza convencionales, que dependen de información previa sobre las propiedades del objeto, el nuevo sistema se adapta en tiempo real mediante la detección de deslizamientos.
A escalas aún menores, los conjuntos de microsensores podrían identificar la masa, la geometría y la densidad del material de diminutas esferas metálicas mediante el análisis de la magnitud y la dirección de la fuerza. Esto abre la puerta a aplicaciones en cirugía mínimamente invasiva o microrrobótica, donde los sensores de fuerza convencionales son demasiado grandes.
Más allá de la robótica, esta tecnología podría tener implicaciones significativas para las prótesis. Las extremidades artificiales avanzadas dependen cada vez más de la retroalimentación táctil para brindar a los usuarios la sensación del tacto. Los sensores de fuerza 3D miniaturizados y de alta sensibilidad podrían permitir interacciones más naturales con los objetos, mejorando el control, la seguridad y la confianza del usuario.
«Nuestro enfoque demuestra que no se requieren estructuras mecánicas voluminosas ni sistemas ópticos complejos para lograr una detección táctil 3D de alta resolución», afirmó el autor principal, el Dr. Guolin Yun, antiguo becario internacional Newton de la Royal Society en Cambridge y actualmente profesor en la Universidad de Ciencia y Tecnología de China. «Al combinar materiales inteligentes con estructuras inspiradas en la piel, logramos un rendimiento que se acerca notablemente al tacto humano».
De cara al futuro, los investigadores creen que los sensores podrían miniaturizarse aún más, potencialmente por debajo de los 50 micrómetros, acercándose a la densidad de mecanorreceptores de la piel humana. Las versiones futuras también podrían integrar la detección de temperatura y humedad, acercándose así a una piel artificial totalmente multimodal.
A medida que los robots se adentran cada vez más en hogares, hospitales y entornos impredecibles del mundo real, estos avances en el tacto podrían ser transformadores, permitiendo a las máquinas no solo ver y actuar, sino también sentir de verdad.
Se ha presentado una solicitud de patente a través de Cambridge Enterprise, el brazo de innovación de la Universidad. La investigación contó con el apoyo de la Royal Society, el Instituto Henry Royce y la Agencia de Investigación e Invención Avanzada (ARIA). Tawfique Hasan es miembro del Churchill College de Cambridge.
Referencia:
Guolin Yun et al. « Sensores de fuerza 3D miniaturizados con estructura multiescala ». Nature Materials (2026). DOI: 10.1038/s41563-026-02508-7
Adaptado de un artículo publicado originalmente en el sitio web de Ingeniería Eléctrica .
Fuente: Universidad de Cambridge



Mas noticias
Cambridge pone en marcha una importante alianza estratégica con IonQ para impulsar la investigación cuántica en el Reino Unido.
Instrucción fiscal de Magnicidio FV finaliza con sorpresas y revelaciones
Red de Fito compró propiedades por USD 20 mil, pero sus avalúos hoy superan el millón de dólares